Astronavigation
Berechnen
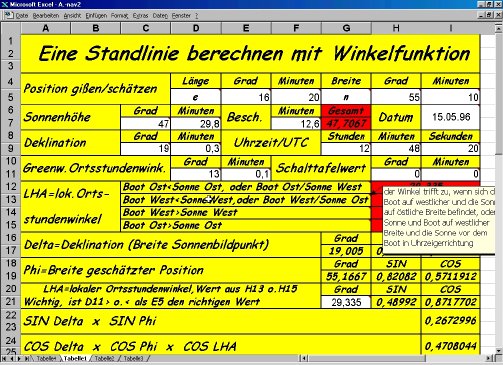
einer Standlinie mit Winkelfunktionen
 Bevor
ich mit meinen Übungen angefangen habe, habe ich eine genau Uhr
auf UTC gestellt. Wenn man mal auf große Reise geht, ist es
wichtig, dass der Datumswechsel auf 24 Uhr UTC steht. Korrigieren
kann man die Uhr nach dem minütlichen Zeitzeichen auf 10000 kHz
oder das stündlich Zeitzeichen der Deutschen Welle. Wichtig ist
noch, Höhenmessungen unter 25° sind zu ungenau und die Zeit
muss sekundengenau zur Höhenmessung passen. Ich habe mir zur
Berechnung eine Excel-Tabelle erstellt. Aus meiner Sicht hat die
Tabelle den Vorteil, man hat alles übersichtlich auf einer
Seite, die Berechnung des lokalen Ortstundenwinkel LHA ist erklärt
und es gibt kein umrechnen. In die weißen Felder werden die
Messwerte eingetragen, die roten Felder sind Ergebnisse und die
gelben Erklärungen. Das Rechnen übernimmt die
Excel-Tabelle.
Bevor
ich mit meinen Übungen angefangen habe, habe ich eine genau Uhr
auf UTC gestellt. Wenn man mal auf große Reise geht, ist es
wichtig, dass der Datumswechsel auf 24 Uhr UTC steht. Korrigieren
kann man die Uhr nach dem minütlichen Zeitzeichen auf 10000 kHz
oder das stündlich Zeitzeichen der Deutschen Welle. Wichtig ist
noch, Höhenmessungen unter 25° sind zu ungenau und die Zeit
muss sekundengenau zur Höhenmessung passen. Ich habe mir zur
Berechnung eine Excel-Tabelle erstellt. Aus meiner Sicht hat die
Tabelle den Vorteil, man hat alles übersichtlich auf einer
Seite, die Berechnung des lokalen Ortstundenwinkel LHA ist erklärt
und es gibt kein umrechnen. In die weißen Felder werden die
Messwerte eingetragen, die roten Felder sind Ergebnisse und die
gelben Erklärungen. Das Rechnen übernimmt die
Excel-Tabelle.
Der
Ablauf:
1.Länge
und Breite der augenblicklichen Position schätzen und in die
Tabelle eintragen. Ost/West oder Nord/Süd nicht vergessen, dient
nur zur Orientierung um z.B. den richtigen Wert des LHA abzulesen.
2.Sonnenhöhe
messen und dazugehörige sekundengenaue Zeit in die Tabelle
eintragen (am besten Sonnenunterkante anpeilen).
3.Beschickung
(Abweichung durch Augenhöhe oder Monat) aus dem Nautischen
Jahrbuch entnehmen und in die Tabelle eintragen
4.Gennwicher
Ortstundenwinkel und Declination aus dem Nautischen Jahrbuch
entnehmen oder von Nautic Tools berechnen lassen und in die Tabelle
eintragen (Werte beziehen sich auf die Messzeit). Wichtig,
befindet sich Boot und Sonne nicht auf einer Halbkugel ist die
Declination negativ, vor den Grad- und Minutenwerten ein Minus
setzen.
5.Den
richtigen berechneten Wert aus den roten Feldern ablesen und in das
weiße Feld LHA eintragen. Vorsicht,
es gibt vier verschiedene Rechnung, das hängt von der Stellung
Boot/Sonne ab. Mit der Maus nach einander auf die roten
Ergebnisfelder des LHA gehen und die Hilfe genau durch lesen.
6.Jetzt
kann der errechnete Wert für hc (Sonnenhöhe geschätzter
Position) und Z (Azimut, die Richtung zu Sonne) abgelesen werden.
7.Den
hc-Wert in das weiße Feld hc eintragen. Wichtig,
die Kommastellen ins extra Feld und immer die ersten drei Stellen
nach dem Komma eintragen, wenn es keine gibt durch Nullen auffüllen.
8.Jetzt
kann im letzten Feld die Entfernung geschätzter- errechneter
Position abgelesen werden, in Seemeilen.
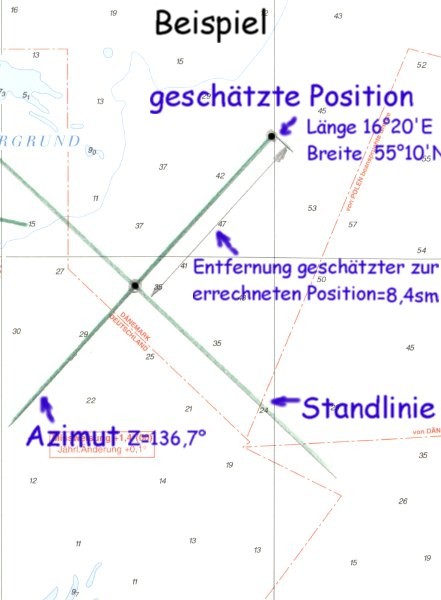 9.Jetzt
wird die geschätzte Position in die Seekarte eingetragen, dann
wird an die Position eine Linie angezeichnet mit dem Azimutwinkel.
Wichtig, vor 12 Uhr UTC von Nord in
Uhrzeigerrichtung, nach 12 Uhr UTC von Nordentgegengesetzt der
Uhrzeigerrichtung. Danach wird die Entfernung geschätzter-
errechneter Position auf die Azimutlinie übertragen. Wichtig,
ist dieser Wert positiv wird er von der geschätzten Position
Richtung Sonne eingezeichnet, ist er negativ von der Sonne weg. Jetzt
können wir im 90°Winkel eine Standlinie durch die errechnete
Position zeichnen auf der irgendwo unser Standort ist.
9.Jetzt
wird die geschätzte Position in die Seekarte eingetragen, dann
wird an die Position eine Linie angezeichnet mit dem Azimutwinkel.
Wichtig, vor 12 Uhr UTC von Nord in
Uhrzeigerrichtung, nach 12 Uhr UTC von Nordentgegengesetzt der
Uhrzeigerrichtung. Danach wird die Entfernung geschätzter-
errechneter Position auf die Azimutlinie übertragen. Wichtig,
ist dieser Wert positiv wird er von der geschätzten Position
Richtung Sonne eingezeichnet, ist er negativ von der Sonne weg. Jetzt
können wir im 90°Winkel eine Standlinie durch die errechnete
Position zeichnen auf der irgendwo unser Standort ist.
10.Um
unseren Standort heraus zu bekommen muss der Punkt 1-9 noch einmal
wiederholt werden um eine 2,Standlinie zu bekommen. Wenn man die
Sonne noch einmal schießt, dann 4-5h später oder ein
anderen Gestirn der sich im 90°Winkel zu Sonne befindet.
Die
Kreuzung beider Standlinien ist unser Standort. Falls wir uns seit
der ersten Messung unseren Standort geändert haben, müssen
wir die versegelt Standlinie 1 gemäß der gesegelten
Strecke und dem Kurs verschieben und der neue Schnittpunkt der
Standlinien ist unsere jetzige Position.
zurück
